"Taking a swing analogy, I dont really see why delay in the time (instant at which, period and drive etc) the swing is pushed should affect its oscillation period, provided its phase is correct - it certainly affects amplitude, but provided it remains synchronous (as in, just enough energy is being injected somewhere in the right phase to overcome losses) what mechanism would cause frequency change?" - FredM
Taking the swing analogy: with enough force you can make it swing at any frequency, but for equal swing amplitudes it will take more energy input (and removed) each cycle the farther you get away from the natural resonant frequency of the swing itself.
The natural frequency of the swing will be a single frequency, but even if the Q of the swing is very high (operating in a vacuum with low friction bearings at the pivot point) the frequency vs amplitude graph for a fixed stimulus energy in will still be somewhat rounded on the top, and so there will be frequencies to either side of resonance that will produce only a slightly lower amplitude for the same energy input. It is these frequencies very near natural resonance that the swing can be easily driven to given offset phase drive.
Think of offsetting the phase of the drive to be a slightly delayed version of the swing amplitude (i.e. you constantly push on it some time after it starts away from you, and you continue to push on it for some time after the lowest point when it is trying to decelerate) - this puts most of the energy into natural resonance, but a bit into fighting it, thus slightly slowing it down (i.e. reducing the frequency below that of natural resonance). If stimulus applied a bit early then there would be a slight speeding up or increase in frequency.
Open loop, this can be seen as a high Q band pass filter passing a sine wave (stimulus). If the input is right at resonance then you get maximal amplitude out. A slightly higher / lower input frequency will give the same slightly higher / lower frequency out with a slightly lower amplitude, and with a corresponding phase shift.
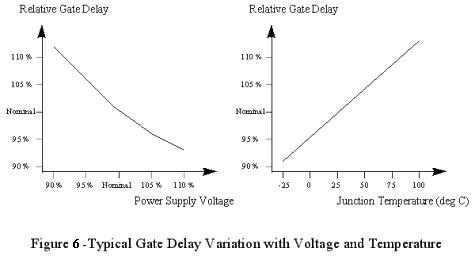
So, closing the loop (to make an oscillator) if the stimulus is offset then we won't get the natural frequency but something close. And if this offset in stimulus (delay) is temperature dependent (like silicon amplifiers / gates have a tendency to be) then we have introduced an element that will change the frequency of the resulting resonant structure with temperature. This effect might be somewhat slight, but still an issue seeing as how we are very concerned with ppm (e.g. null point movement).
As I understand it, the Barkhausen Criterion just says that you need a gain of at least 1 from output to input at the resonant frequency, and the resonant period will be equal to the total delay through the loop (or some integer multiple of it including zero).
For LC, we can only limit drive energy so much before the amplitude drops like a rock with external loading and such, so we give it more than it needs to overcome Q loss in order to make sure it starts quickly and operates in a robust manner, but this also means there is excess energy available to drive the oscillator somewhat off resonance if it is so inclined. So one way to maximize temperature stability is to pick delay elements (L, C, sense & drive) that are relatively insensitive to temperature changes. If silicon delays are tiny compared to the period then if/when they change with temperature it will be less of an issue. This could be a reason to use high speed CMOS, particularly if CMOS is already being used and the design can tolerate a faster component. Or a UHF FET in a 300kHz oscillator.